Bevor wir beginnen, ESP32 mit dem PIR-Sensor zu verbinden, müssen wir wissen, wie Interrupts funktionieren und wie sie in ESP32 gelesen und behandelt werden. Lassen Sie uns die Funktionsweise von PIR mit ESP32 im Detail besprechen.
Hier ist der Inhalt für diesen Artikel:
1.1: Unterbricht Pins in ESP32
2: Aufruf eines Interrupts in ESP32 – MicroPython
3: PIR-Sensor mit ESP32 verbinden – MicroPython
3.1: PIR-Bewegungssensor (HC-SR501)
1: Was sind Interrupts?
Die meisten Ereignisse, die bei der ESP32-Programmierung auftreten, werden sequentiell ausgeführt, was bedeutet, dass Code Zeile für Zeile ausgeführt wird. Zum Behandeln und Steuern der Ereignisse, die während der sequentiellen Ausführung von Code nicht ausgeführt werden müssen Unterbricht werden verwendet.
Wenn wir beispielsweise eine bestimmte Aufgabe ausführen möchten, wenn ein besonderes Ereignis eintritt oder ein Triggersignal an digitale Pins des Mikrocontrollers gegeben wird, verwenden wir Interrupt.
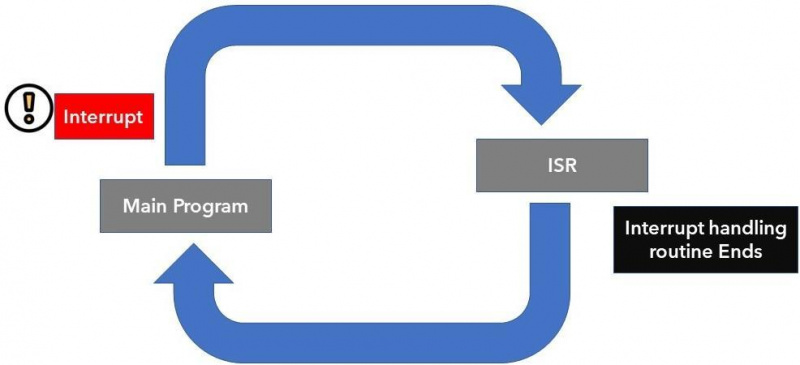
Bei einer Unterbrechung müssen wir den digitalen Zustand des ESP32-Eingangspins nicht ständig überprüfen. Wenn ein Interrupt auftritt, hält der Prozessor das Hauptprogramm an und eine neue Funktion wird aufgerufen, die als ISR bekannt ist ( Dienstroutine unterbrechen ). Dies ISR Funktion behandelt den Interrupt, der danach verursacht wird, kehren Sie zum Hauptprogramm zurück und beginnen Sie mit der Ausführung. Eines der Beispiele für ISR ist der PIR-Bewegungssensor, der einen Interrupt generiert, sobald eine Bewegung erkannt wird.
1.1: Unterbricht Pins in ESP32
Ein externer oder Hardware-Interrupt kann durch jedes Hardwaremodul wie Berührungssensor oder Drucktaster verursacht werden. Berührungsunterbrechungen treten auf, wenn eine Berührung an ESP32-Pins erkannt wird, oder GPIO-Unterbrechungen können auch verwendet werden, wenn eine Taste oder ein Druckknopf gedrückt wird.
In diesem Artikel lösen wir einen Interrupt aus, wenn die Bewegung mit dem PIR-Sensor mit ESP32 erkannt wird.
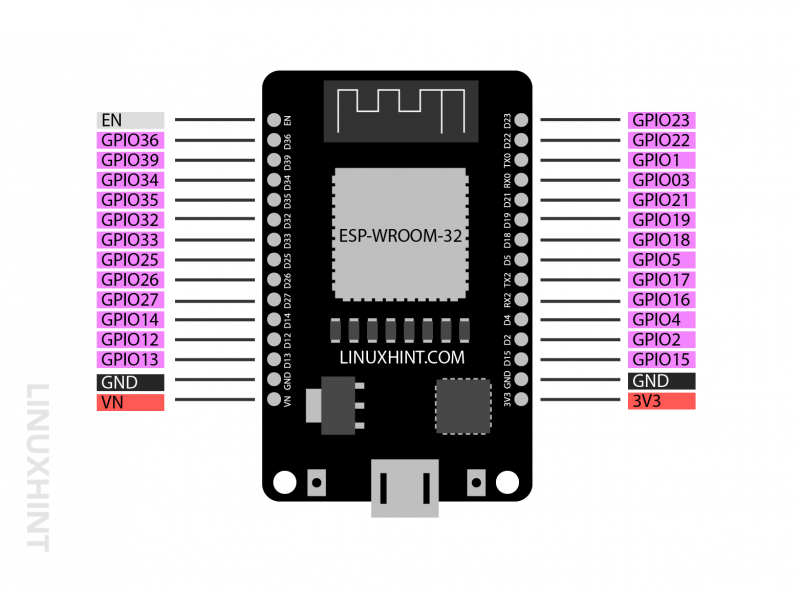
Fast alle GPIO-Pins mit Ausnahme von 6 SPI-integrierten Pins, die normalerweise im 36 Pin-Version der ESP32-Karte kann nicht für Interrupt-Aufrufe verwendet werden. Um den externen Interrupt zu erhalten, sind die folgenden Pins in ESP32 verwendbar:
2: Aufruf eines Interrupts in ESP32 mit MicroPython
So programmieren Sie ein ESP32-Board mit PIR-Sensor mit MicroPython-Code. Wir müssen eine Interrupt-Funktion definieren. Im Folgenden sind einige einfache Schritte aufgeführt, die bei der Definition eines Interrupts für die ESP32-Karte helfen.
Schritt 1: Interrupt-Handling-Funktion initialisieren: Die Unterbrechungsbehandlungsfunktion sollte auf einfache Weise definiert werden, damit sie schnell ausgeführt werden kann und so schnell wie möglich zum Hauptprogramm zurückkehrt. Dies kann durch Definieren einer globalen Variablen erfolgen, sodass auf sie überall im Code zugegriffen werden kann, wenn sie aufgerufen wird.
Hier verwenden wir im Falle eines PIR-Sensors den GPIO-Pin als a global Variable. Die Interrupt-Funktion nimmt einen Pin als Argument und beschreibt den GPIO-Pin, der bewirkt, dass die Interrupt-Funktion auftritt.
def handle_interrupt ( Stift ) :Schritt 2: Richten Sie den GPIO-Pin für einen Interrupt ein: Um den Wert des GPIO-Pins zu erhalten, müssen wir ein Objekt erstellen, das mithilfe von Eingaben von ihm entgegennimmt Einstecken als zweites Argument in unserer Pin-Klasse. Wir können dies mit jedem anderen umbenennen.
Stift = Stift ( 13 , Stift. IN )Schritt 3: Verbinden Sie den Interrupt mit der Methode irq() mit dem GPIO-Pin für den PIR-Sensor:
Mit dem folgenden Befehl können wir den Interrupt auf einen zuvor definierten Pin setzen.
die Brücke. IRQ ( Abzug = Stift. IRQ_RISING , Handler = handle_interrupt )Das irq() -Methode wird verwendet, um den Interrupt an den Pin anzuhängen. irq() akzeptiert zwei verschiedene Argumente:
- Abzug
- Handler
Abzug: Dieses Argument erklärt den Triggermodus. Es folgen drei Modi:
- Pin.IRQ_FALLING: Wenn ein Pin von HIGH auf LOW wechselt, wird ein Interrupt gestartet.
- Pin.IRQ_RISING: Beim Übergang des Pins von LOW auf HIGH wird ein Interrupt gestartet.
- Pin.IRQ_FALLING|Pin.IRQ_RISING: Lösen Sie den Interrupt immer dann aus, wenn ein Pin seinen Zustand ändert. Jeder Pin geht auf HIGH oder LOW.
Handler: Diese Funktion wird aufgerufen, sobald ein Interrupt ausgelöst wird.
3: PIR-Sensor mit ESP32 verbinden
Da wir jetzt die Interrupt-Konzepte mit ESP32 unter Verwendung von MicroPython behandelt haben, werden wir jetzt den PIR-Sensor mit ESP32 verbinden. Hier werden wir verwenden Pin.IRQ_RISING Modus im MicroPython-Code für den PIR-Sensor, da wir jedes Mal eine LED auslösen möchten, wenn der PIR-Sensor eine Bewegung erkennt. Diese LED bleibt für eine festgelegte Zeit eingeschaltet und schaltet sich dann aus.
Folgende Komponenten werden benötigt:
- ESP32-Entwicklungsboard
- PIR-Bewegungssensor (HC-SR501)
- 220 Ohm Widerstand
- Überbrückungsdrähte
- Brotschneidebrett
- LED
Schema für PIR-Sensor mit ESP32:
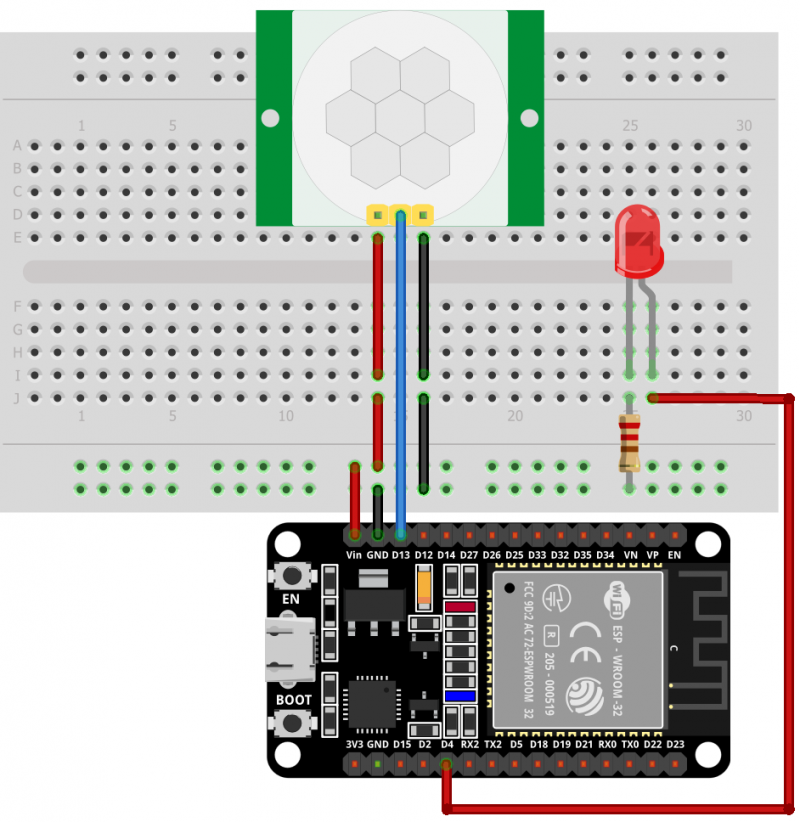
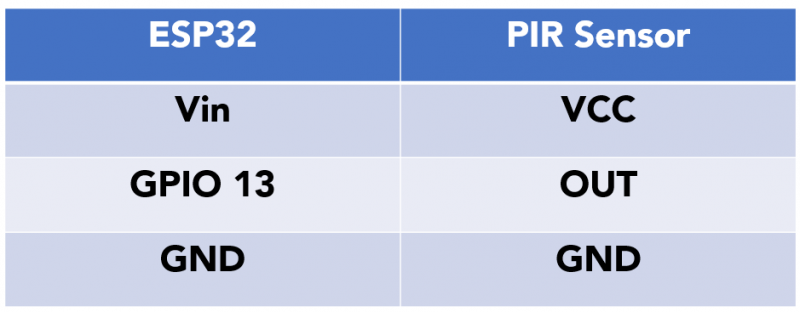
Pin-Konfiguration von ESP32 mit PIR-Sensor ist:
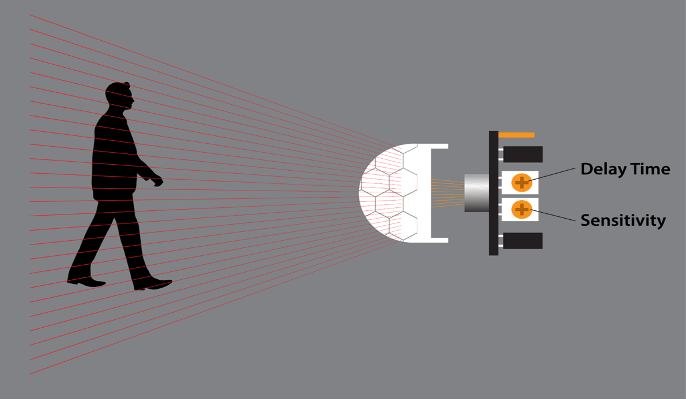
3.1: PIR-Bewegungssensor (HC-SR501)
PIR ist ein Akronym für Passiv-Infrarot-Sensoren . Zwei pyroelektrische Sensoren werden zusammen verwendet, um die Wärmemenge in der Umgebung zu erfassen. Diese beiden pyroelektrischen Sensoren liegen hintereinander und wenn ein Objekt in ihren Bereich kommt, führt eine Änderung der Wärmeenergie oder die Signaldifferenz zwischen diesen beiden Sensoren dazu, dass der Ausgang des PIR-Sensors LOW ist. Sobald der PIR-Ausgangspin auf LOW geht, können wir eine bestimmte Anweisung zur Ausführung einstellen (LED blinkt).
Im Folgenden sind die Eigenschaften des PIR-Sensors aufgeführt:
- Die Empfindlichkeit kann je nach Standort des Projekts eingestellt werden (z. B. Erkennen von Maus- oder Blattbewegungen)
- Der PIR-Sensor kann so eingestellt werden, wie lange er ein Objekt erkennt
- Weit verbreitet in Haussicherheitsalarmen und anderen thermischen Bewegungserkennungsanwendungen.
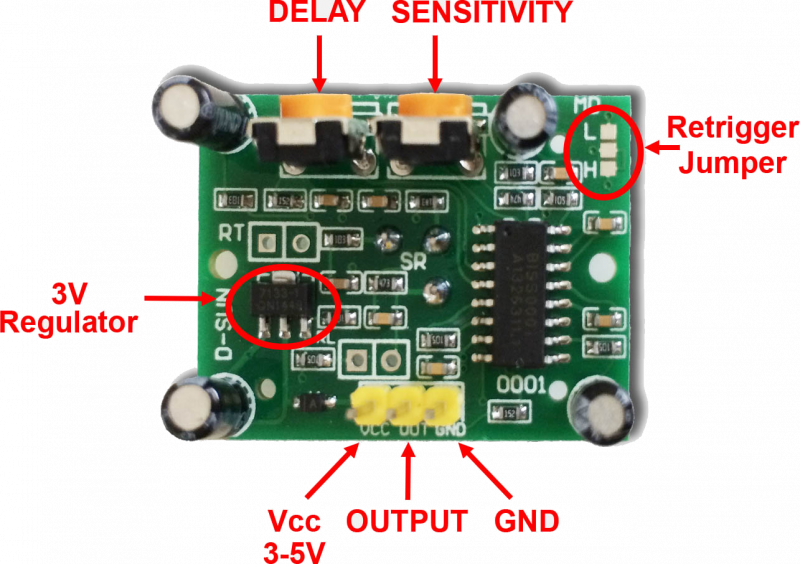
3.2: Pinbelegung HC-SR501
PIR HC-SR501 wird mit drei Stiften geliefert. Zwei davon sind Power-Pins für Vcc und GND und einer ist der Ausgangspin für das Triggersignal.
Im Folgenden finden Sie die Beschreibung der PIR-Sensorstifte:
| Stift | Name | Beschreibung |
| 1 | Vcc | Eingangsstift für Sensor Verbinden mit ESP32 Vin Pin |
| zwei | AUS | Sensorausgang |
| 3 | Masse | Sensormasse |
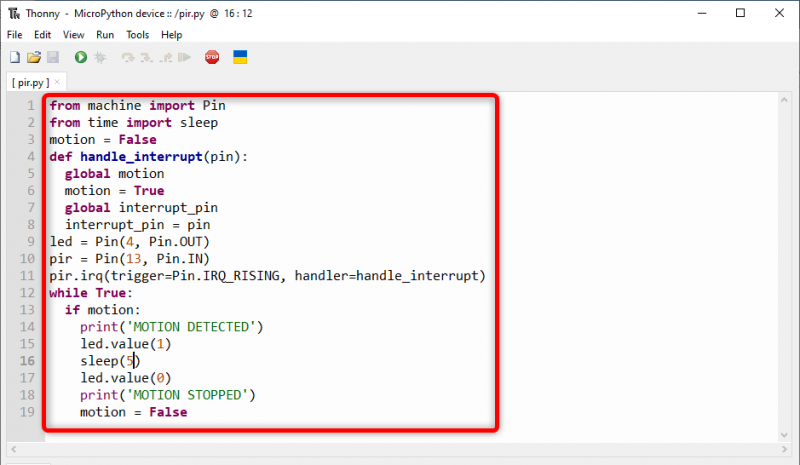
Um nun ESP32 zu programmieren, schreiben Sie den angegebenen Code in den Thonny IDE-Editor oder eine andere MicroPython-IDE und laden Sie ihn auf ESP32 hoch.
aus Maschinenimport Pinaus Zeit Schlaf importieren
Bewegung = FALSCH
def handle_interrupt ( Stift ) :
globale Bewegung
Bewegung = WAHR
globaler interrupt_pin
interrupt_pin = Stift
LED = Stift ( 4 , Stift. AUS )
die Brücke = Stift ( 13 , Stift. IN )
die Brücke. IRQ ( Abzug = Stift. IRQ_RISING , Handler = handle_interrupt )
während WAHR :
wenn Bewegung :
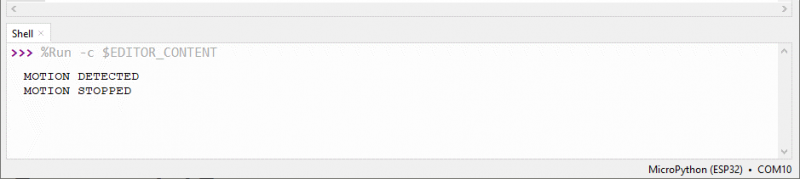
drucken ( 'BEWEGUNG ERKANNT' )
LED. Wert ( 1 )
schlafen ( 5 )
LED. Wert ( 0 )
drucken ( 'BEWEGUNG GESTOPPT' )
Bewegung = FALSCH
Zuerst importierten wir die Stift Klasse aus dem Maschinenmodul und schlafen Methode zum Hinzufügen einer Verzögerung. Als nächstes wird eine Variable mit Namen erstellt Bewegung. Diese Variable erkennt, ob eine Bewegung erkannt wird oder nicht.
Dann haben wir eine Funktion erstellt handle_interrupt. Jedes Mal, wenn der PIR-Sensor eine Bewegung erkennt, wird diese Funktion aktiviert. Es nimmt einen Pin als Eingabeparameter und gibt den Pin an, der den Interrupt verursacht.
In einfachen Worten, jedes Mal, wenn PIR eine Bewegung erkennt, handle_interrupt wird die Bewegungsvariable auf wahr setzen und den Pin speichern, der den Interrupt verursacht. Eine Sache, an die man sich erinnern sollte erklärt immer die Bewegung Variable als global, da sie im gesamten Code benötigt wird.
Im weiteren Verlauf haben wir zwei Pin-Objekte erstellt, eines zum Speichern von LED-Pins und das zweite nimmt die PIR-Sensorausgabe an GPIO-Pin 13 auf. Außerdem haben wir den Trigger-Pin deklariert STEIGEND Modus.
In dem Schleife Als Teil des Codes wird der Wert der Bewegungsvariablen überprüft, sobald sie wahr wird. Die LED wird an Pin 4 von ESP32 angeschlossen. Wenn die Bewegung gestoppt wird, erlischt die LED nach 5 Sekunden.
3.4: Ausgabe
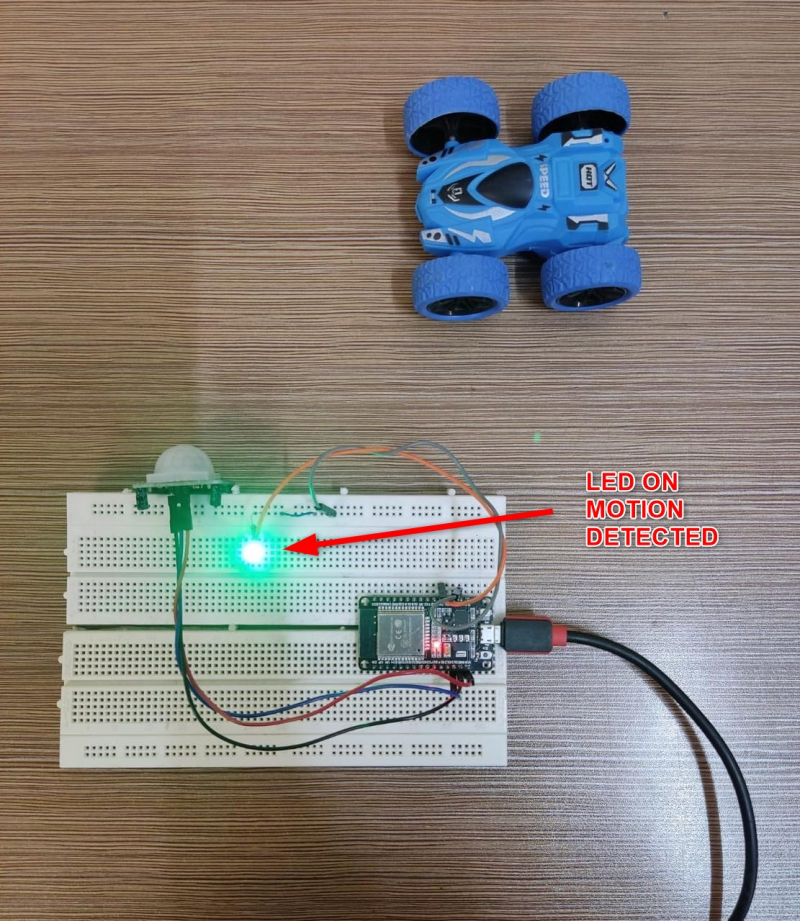
Im Ausgabebereich können wir sehen, dass das Objekt außerhalb der Reichweite des PIR-Sensors liegt, also die LED Wird gedreht AUS .
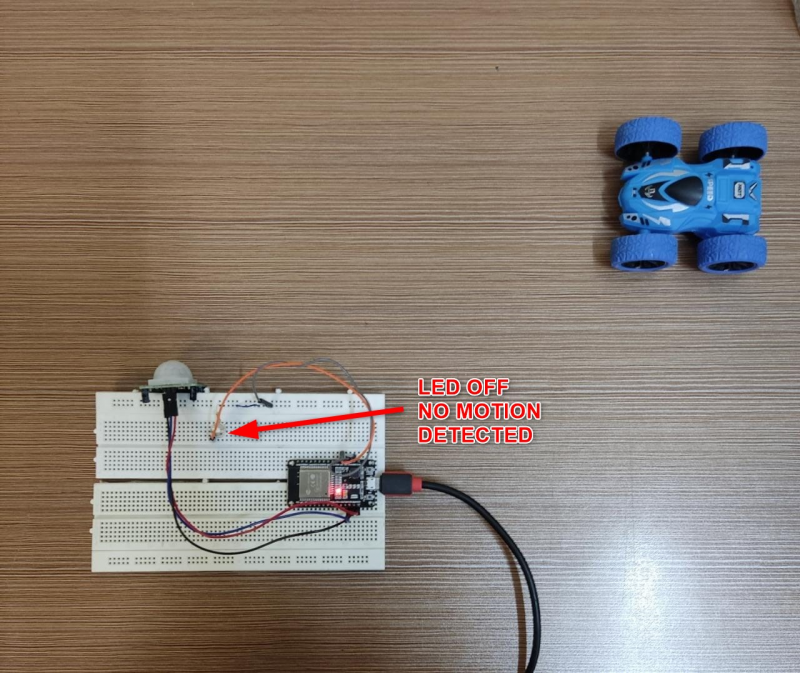
Jetzt dreht sich die von der PIR-Sensor-LED erkannte Bewegung AN zum 5 Sek Danach bleibt es, wenn keine Bewegung erkannt wird AUS bis der nächste Trigger empfangen wird.
Die folgende Ausgabe wird durch die angezeigt Shell/Terminal in Thonny IDE.
Fazit
Ein PIR-Sensor mit ESP32 kann helfen, Bewegungen verschiedener Dinge zu erkennen. Mit der Interrupt-Funktion in MicroPython mit ESP32 können wir eine Antwort an einem bestimmten GPIO-Pin auslösen. Wenn eine Änderung erkannt wird, wird die Interrupt-Funktion ausgelöst und eine LED leuchtet auf.